|
|
|
Szervó vezérlés
|
Témaindító: Frankye, idő: Júl 1, 2014
Témakörök:
|
|
|
(#54298) proba válasza HarciSün hozzászólására (#54296)
|
Válasz •
|
Nov 22, 2016 |

|
Én csak azért mertem javasolni, mert az volt a gondod, hogy a telefon foglalt...
Különben is, aki ezt a forumot olvassa, valószínűleg ugyanúgy fertőzött mint te, és nem a kész megoldásokra hajt. Ill ha az olcsóság miatt akar sajátot, akkor csak akkor jut eredményre, ha a végén ő is fertőzött lesz.
|
|
(#54302) HarciSün válasza proba hozzászólására (#54298)
|
Válasz •
|
Nov 22, 2016 |
|
Ja, hogy úgy - így már értem  Majd ha olyan állapotba lesz, hogy érdemes róla megint videót csinálni akkor tabletről/laptopról irányítom és akkor szabad marad a telefon
Nem csak az olcsóság a cél (persze az is) hanem az "akkor is meg tudom csinálni". Az olcsóság inkább azért motivál mert látva a gyári megoldások árait nem győz kerekedni a szemem... (a saját androidos vezetéknélküli DCC vezérlőm sem került többe anyagárban mint 3000Ft, és milyen poén már, hogy ennyiből vezeték nélküli távirányítóm van)
Addig szeretnék a kütyüvel eljutni, hogy aki kedvet érez hozzá az is meg tudja csinálni és olcsón lehessen csilli-villi terepasztal vezérlője. |
|
(#54304) Váltógyártó válasza HarciSün hozzászólására (#54267)
|
Válasz •
|
Nov 23, 2016 |
|
HILFE!!!
Megépítettem ezt a csodaszerkezetet, és persze nem működik. Elsőre azt hittem, hogy csak elkötöttem valamit, de többször átnéztem, és megegyezik a rajzzal. Utána átnéztem a rajzot, és találtam valamit, amit én anomáliának gondolnék, józan paraszt ésszel, mert ugye egyáltalán nem értek hozzá.
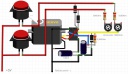
Mi a különbség, ha az egyik kapcsolót nyomom, és mi, ha a másikat? Mindkettő a pozitívról indul, mindkettő egy-egy diódával át van kötve a 4-8 lábra és a szervó pozitív kimenetére, utána mindkettőn van sorban egy 56K ellenállás, és egy 100K poti, és mindkettő be van kötve a 7. lábhoz. |
|
|
|
(#54305) etwg válasza Váltógyártó hozzászólására (#54304)
|
Válasz •
|
Nov 23, 2016 |
|
Az hogy a két potival más-más állást tudsz beállitani. Ez a feladata, hogy ha az egyik kapcsolot nyomod meg a szervo ide forduljon , ha a másikat akkor meg oda. Semmi más, az IC 3. Lábán más impulzusok mennek a szervoba. |
|
(#54308) HarciSün válasza Váltógyártó hozzászólására (#54304)
|
Válasz •
|
Nov 23, 2016 |
|
Ahogy etwg írta: a két poti a végállásnak megfelelően ugye más állásban van ezért az 555 más pwm jelet ad ki ha az egyiken vagy a másikon át kapja a delejt. A diódák azért kellenek mert bármelyiket nyomod (és csak addig) kapjon áramot a cucc de a dióda meggátolja, hogy "visszapofázzon" a másik ágra.
(De már úton van feléd a "mintadarab" rugós kapcsolóstul) |
|
(#54310) HarciSün válasza Váltógyártó hozzászólására (#54304)
|
Válasz •
|
Nov 23, 2016 |
|
Alkottam egy ilyen csoda rajzot - hátha így egyértelműbb (remélem nem szúrtam el) |
|
|
|
(#54312) Váltógyártó válasza HarciSün hozzászólására (#54310)
|
Válasz •
|
Nov 23, 2016 |
|
Örök hálám sírig üldöz!  |
|
(#54314) HarciSün válasza Váltógyártó hozzászólására (#54312)
|
Válasz •
|
Nov 23, 2016 |
|
Majd írd meg, hogy megvan-e a hiba, működik-e rendesen... |
|
(#54315) Váltógyártó válasza HarciSün hozzászólására (#54314)
|
Válasz •
|
Nov 23, 2016 |
|
A bekötéssel nincs, az biztos jó, elmentem a másik rajzon is, lehet, hogy a szervó a sz@r. Bár közvetlen motorról leteszteltem, úgy működik. A jel lábra mit kell adni, hogy lehessen tesztelni? |
|
(#54316) HarciSün válasza Váltógyártó hozzászólására (#54315)
|
Válasz •
|
Nov 23, 2016 |
|
A szervó jelbemenetét sajnos nem tudod tesztelni csak pwm jellel (amit ez az áramkör ad ki)
Viszont az áramkör működését tudod barkács módon tesztelni: a jel kimenetére köss egy led hosszabbik (pozitív) felét, a másikat meg kösd hozzá a földhöz (igazából egy ellenállás sem ártana de rövid időre nem lesz baj a lednek) ha gombnyomásra felvillan akkor ad ki magából valamit, ha nem akkor lehet hogy az IC döglött meg (pl ha fordítva kötötted rá egyszer is a szervót) |
|
(#54317) Váltógyártó válasza HarciSün hozzászólására (#54316)
|
Válasz •
|
Nov 23, 2016 |
|
Idézet:
„lehet hogy az IC döglött meg (pl ha fordítva kötötted rá egyszer is a szervót)”
Ilyen biztos volt, mert nem tudtam, melyik a jel láb, olyan kicsi volt az S betű, hogy sokáig nem vettem észre. 
Persze ennek a gagyi kínai szervónak nem normál színezése van...
Szóval akkor IC csere. |
|
(#54319) etwg válasza Váltógyártó hozzászólására (#54317)
|
Válasz •
|
Nov 23, 2016 |
|
Ha nem megy az a vacak szervo nyugodtan vágd a földhöz ( ha szönyeg van). Segit mint a szovjet univerzális kalapács... ( nekem is beakadt a fogaskerék de némi csapkodás után elindult).
Amugy Harcisün kolléga rajza egy kicsit veszélyes a kezdönek, mert ha a szervoba olyan jelet adsz, amit nem szabad, akkor az beakad ( rendszerint mechanikusan). Igy ezt az áramkört jo lenne elöbb oszcilloszkopon beállitani (Csikosnak van) mielött kitömöd a szervokat. Az alkatrészek szorása böven a tartományon kivülre viheti a jelet. |
|
(#54320) Váltógyártó válasza etwg hozzászólására (#54319)
|
Válasz •
|
Nov 23, 2016 |
|
A szervo műxik, az tuti, csak a motort kipróbáltam, egész tartományban mozog. |
|
(#54321) etwg válasza Váltógyártó hozzászólására (#54320)
|
Válasz •
|
Nov 23, 2016 |
|
Akkor jelek idözitése nem jo ( pontatlan alkatrész, trimmer beállitás. |
|
(#54322) HarciSün válasza etwg hozzászólására (#54321)
|
Válasz •
|
Nov 23, 2016 |
|
Vagy a fordított bekötés miatt az IC múlt ki - még jó, hogy nem egy drága dolog.
Valóban túl lehet tekerni, ezért érdemes először kb középállásba tekerni mindkét trimmert és utána állítani...
(és nemsokára odaér a minta kütyü, amit kipróbáltam és tuti működik) |
|
(#54323) etwg válasza HarciSün hozzászólására (#54322)
|
Válasz •
|
Nov 23, 2016 |
|
Forditva aligha tudta bekötni, mert ott vannak a diodák, amik védik. A szervot meg nem igen lehet a külsö jelekkel kinyirni (hacsak nem került rá >10V). |
|
(#54324) Csukló válasza HarciSün hozzászólására (#54310)
|
Válasz •
|
Nov 23, 2016 |
|
Így már én is kezdem érteni
|
|
(#54326) HarciSün válasza Csukló hozzászólására (#54324)
|
Válasz •
|
Nov 24, 2016 |
|
Írd meg, hogy sikerült! |
|
(#54338) HarciSün hozzászólása
|
Válasz •
|
Nov 25, 2016 |
|
Feltöltöttem egy videót a youtube-ra, hogy hol tart a wemos szervóvezérlő kütyü:
VIDEO
Ha valaki kísérletezni akarna akkor felrakom ide a .ino fájlt és a html-t is.
Leírás a chp-re töltött html használatáról és ahonnan én is elindultam:
websocket/HTML |
|
|
|
(#54349) HOTotya válasza HarciSün hozzászólására (#54245)
|
Válasz •
|
Nov 27, 2016 |
|
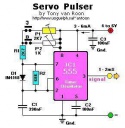
Én 8-9 éve ezt használom....szinte ugyanaz.......555-l ezt lehet kihozni.. |
|
|
|
(#54366) HarciSün válasza HOTotya hozzászólására (#54349)
|
Válasz •
|
Nov 28, 2016 |
|
Ez tényleg szinte ugyan az. Ezek szerint akárhonnan nézzük analóg módon kezelve kb ez a megoldás a legjobb.
Kíváncsi vagyok vagyok Váltógyártónak és Csuklónak sikerült-e összefabrikálni... |
|
(#54367) piltdownman válasza Váltógyártó hozzászólására (#54315)
|
Válasz •
|
Nov 29, 2016 |
|
Szervo nélkül mérd meg a 3. lábon a frekvenciát (kb. 50Hz) multiméterrel. Ha nincs ilyen üzemmódja, fülhallgatóval (soros 1k-n keresztül) hasonlítsd össze a zongora normál A-ja alatti harmadik oktáv környéki hangokkal vagy az ITT lévő hanggenerátor hangjával.
Mérd meg DC állásban a 3.lábon a fesz.-t (Udc)
Az impulzus szélesség = Udc/U * T , ahol
T: periódus idö a mért frekvencia reciproka
U: az 555 tápfeszültsége – 0.5V.
A szokásos T=20ms esetén az 1ms és 2ms pulzusoknál 5V.5 V tápfesz.nél 250 ill. 500mV-ot kéne mérni.
multimeter |
|
(#54370) Frankye válasza HarciSün hozzászólására (#54366)
|
Válasz •
|
Nov 29, 2016 |
|
Csukló barátomnak én készítek - egyelőre - egy prototípust, de még várja a motort is a rendelésből. |
|
(#54371) DZolTTán hozzászólása
|
Válasz •
|
Nov 29, 2016 |
|
Ha már "DIY" (csináld magad) szervó vezérlésről van szó, akkor had említsem meg a DCC-s verziót is, ami szerintem szintén jó alternatíva. A kapcsolás még egyszerűbb, nem is drágább, és egyből 4db szervót vezérel.
4 servo decoder v.2
Igaz, hogy kell hozzá egy DCC központ, de aki eleve ebben utazik, annak ez nem plusz költség.
Hátrány: nem lehet csak úgy 2 nyomógombbal vezérelni.
Előny:
- nem kell minden szervóhoz külön kábeleket húzni a vezérlőpulttól
- nem kell kapcsolópultot építenünk, irányíthatjuk PC-ről, tabletről, telefonról akár. (Pl. RocRail vagy TrainConroller programból) Így egyből megvan a visszajelzés is, a váltók állásáról.
- ha mégis szeretnénk kapcsolópultot, akkor kb. 1000Ft-ból építünk 1db ilyet XbusTCO , erre aztán már ugyan úgy elég nyomógombokat vagy billenőkapcsolókat aggatnunk, és elmegy róla 105db váltó. Viszont ehhez nem 210 kábel fog szétkúszni belőle, hanem csak 4 ér. |
|
(#54401) BLaci hozzászólása
|
Válasz •
|
Dec 2, 2016 |
|
Korábban próbáltam jópár servotester kapcsolást, melyek esetében a max kitérésig való szabályozhatóságot kisérleteztem ki. Az alap kapcsolások azok csak úgy töttek a netrol a probapanelos kisérletezés meg itthon. Mindegyik analog kapcsolás. Általában 5 ből 1 szokott jó lenni. A legelső nekem is 555 ös ic vel volt de aztán megjelentek a digitális szervok és velük együtt a fölösleges zavarszerü zizegés. Ezért kellett tovább kutakodnom jobb minőségű szervó tesztereknek. Ezt követte a 4001 -es ic-és kapcsolás, majd a 4093-as majdan a NE556-os ez 2 db 555-öst tartalmaz. A legutolsó bizonyult a legstabilabbnak és szinte tökéletes jelt készít, legalábbis a 12 kilós turnigy digitális szervok is simán mennek róla zavar nélkül. mindegyik panelon van lét poti. Az egyik szervóteszterként (270 fokos kitérést produkál) a másikkal egy köztes kitérést lehet szabadon állítani. Ezt egy nyomógombal működtetem. Ha túl gyors a szervó mozgás, akkor az áramkört egy szervo "GOSLOW"áramkörrel lehet kiegészíteni, mellyel a szervo kitérés sebességét lehet beállítani ízlés szerint. Egyébként a vevők kimenő feszültsége 200-780 mv közt van, ezt sima digitális multiméterrel méred. Már voltam úgy digitális szervónál, hogy a megadott értéknél nagyobb feszültséget adtam a jel bemenetre persze 5V nál kisebbet, de semmi baja nem lett, csak értelmezni nem tudja, ilyenkor semmit se csinál. Az analog szervok viszont, ilyenkor kimennek valamelyik végállásban és kész. A servokábelek jelentése: fekete 0 vagy GND, piros +5-6Volt, a harmadik sárga meg ami épp van az a jel (PWM) négyszög jel stb. A szervókból lehet körforgós mechamikát is csinálni. A szervóban lévő potméter helyére ellenállás létrát teszel amivel a nulpontot beállítod. Az utolsó hajtott fogaskerékról az ütközőt levágod és jelszélességtől függően lesz egy jobbr vagy balra forgó olcső áttételházas PWM jelről működő hajtásláncod mechanikák mozgásához pl szélkerék vizimalom stb. (gyári áttételház 6-10000 ft egy szervo 2 kg-os meg 1000 ft) |
|
|
|
(#54635) dikdom hozzászólása
|
Válasz •
|
Dec 17, 2016 |
|
Sziasztok! Azt szeretném kérdezni, hogy ti milyen rudat szoktatok használni (és honnan lehet olyat beszerezni) az SG90 -es szervóhoz, amikor váltó állítóműnek használjátok? A gemkapocs tényleg jól használható? Tillig EW1 -es váltókat szeretnék velük állítani... Nagyon örülnék ötleteknek (vagy beszédes fényképeknek is), de csak 1-2 képet találtam a neten, különösebb leírás nélkül...
Köszönöm a segítséget! |
|
(#54636) etwg válasza dikdom hozzászólására (#54635)
|
Válasz •
|
Dec 17, 2016 |
|
A gemkapocs tökéletes, de ha van akkor a 0,7 mm acéldrot is jo, meg az 1mm-s kemény sárgarézdrot. Az utobbit tekercsben lehet találni a nagyobb barkácsáruházakban. Adrot vastagságát néha meg kell válogatni, higy a szervo még le tudja küzdeni az anyag rugalmasságát.
- korábban berakott eljárás a gemkapoccsal nagyon jo, mert nagyon egyszerü a huzal rögzitése a szervo karjában. |
|
(#54644) gigantati válasza dikdom hozzászólására (#54635)
|
Válasz •
|
Dec 17, 2016 |
|
Két oldallal ezelőtt az 53778 hozzászólásomnál találsz képeket a gem kapcsos kialakításról. Teljesen jól működik, csak ajánlani tudom. |
|
(#54646) dikdom válasza HarciSün hozzászólására (#54296)
|
Válasz •
|
Dec 18, 2016 |
|
Te Sün!
Kb 1 hónapja (bocsánat, 1 hónap óta folyamatosan) pont uezekkel a problémákkal szembesültem, bár én leragadtam ott hOGY a html-be ágyazott csúszka jó helyen legyen+tabletről is működjön. A websocket helyett HTTP POST -ot használok, ami szuboptimális. Eredetileg UDP-t szerettem volna de az nincs javascriptben. A websocket is ott van a backlogban, de odáig meg nem jutottam el. Szervernek egyelőre egy egyszeru python kód fut, szépen megérkezik a slidertől a 'sebesség állítás' parancs.
A képekig még el sem jutottam. Arra azt hittem hOGY jó lesz ha click-range-eket adok meg. De ha a képet skálázni kell a kijelző méreteihez akkor a range-élet is skálázni kell. És a váltók állását még nem is rajzoltam ki... A 20x20-as táblában kicsi képek nagyszerű ötlet, de az baromi lassan fog letöltődni. En PI-t használok webszervernek, azért az se egy atomerőmű...
A html/javascript kombóval én is úgy lehetek mint te: tanulom, de döcögősen. A DIV, a DISPLAY, a FLOAT meg ilyen vackok még mindig rosszban vannak velem.
Beküldenéd a html forrásodat hOGY te hogyan oldottad meg végül a kontrollok elhelyezését (akár butítva, nem a hadititkokra vagyok kíváncsi, csak a HTML trükkökre)? És hogyan rajzolsz svg-be realtime? Vagy most egy dominóból szeded ki a képeket?
Köszönöm!
(Tegnap este óta végigolvastam a teljes fórumot. Tanulmányos olvasmány volt.) |
|
(#54647) dikdom válasza gigantati hozzászólására (#54644)
|
Válasz •
|
Dec 18, 2016 |
|
Köszönöm, valamikor tegnap éjjel olvastam!
Jövő héten beszerzem az uprofilt és a gemkapcsokat, aztán szerelek!! |
|
(#54650) HarciSün válasza dikdom hozzászólására (#54646)
|
Válasz •
|
Dec 19, 2016 |
|
Szia!
Az SVG-s rajzolgatást egyenlőre jegeltem mert lassúúúú. A websocket viszont nagyon jól bevált a parancsok küldésére-fogadására. (gyors, nem tölti újra az oldalt, script-ből szépen lehet változtatni az adatokat stb... szóval ez a jó út)
Nekem a legnagyobb fejtörést az okozta, hogy hogyan fogom elmenteni, illetve visszatölteni a szervó pozíciókat úgy, hogy az meg is jelenjen. Erre végül azt találtam ki, hogy a HTML végét lehagyom, azt a szerver fűzi hozzá és abban vannak a parméter átadások script-ben. (az arduino-ban pedig majd az eeprom write/read-el lehet letárolni az adatokat)
Csatoltan elküldöm a websocket.ino-t is (arduino kód) és a home.html-t is (home-html.aaa - mert nem enged a fórum html-t feltölteni). Nincs semmi hadititok, szemezgess nyugodtan belőle.
Én egyébként arra gondoltam, hogy egyrészt lenne ez a kütyü benne a webszerverrel ami tulajdonképpen egy "setup oldal lenne" ahol beállítod a szervók helyzeteit és persze innen is kezelhető lenne ÉÉÉS fogadna sima GET kéréseket is, azaz, ha valaki csinál magának (minta alapján) helyi HTML-t képekkel, rajzokkal akármivel, akkor sima link-ekkel tudná váltani a váltókat... És persze ez 16 kimenettel tehát így egyben jó lehetne egy otthoni terepasztal alá mint "vezérlőszámítógép". |
|
|
|
(#54655) dikdom válasza HarciSün hozzászólására (#54650)
|
Válasz •
|
Dec 19, 2016 |
|
Köszi,
megnézem!
Nekem most úgy tűnik, hogy megy a vezérlés (kidobtam a francba a DIV-eket és TABLE -kal oldottam meg a faék egyszerű elrendezésemet). A vonat egy fél órás debug után elindult visszafelé is... Holnap sorompó és az egyszem váltóm következik (első ütem - következő ütem valamikor jövőre). Azt hiszem az asztalvezérlés fórumon majd írok róla (megint) egy hosszabbat, hogy mit hogyan sikerült megcsinálni. Addig privátban szívesen elmesélem, hogy nálam hogyan lesz.
Ha sikerül egyáltalán megcsinálni. Most az 1m -es telefonkábel miatt aggódom. Azon ugye van 4 ér. Abból 3-at terveztem a szervónak, a negyediket meg a váltó fémgyökéhez. Se nem csavart, se nem árnyékolt. Nem szeretnék pofára esni, de korábbi hsz -ekből ez következik. Holnap remélhetőleg kiderül.
Megvan az alu Uprofil is, nem fértem a bőrömbe és még vasárnap du. megvettem, bár alacsonyabb, mint amiket itt eddig láttam. Ez max 1cm magas, de végülis ebbe is beleszorul az SG90. Szemben a profilokkal voltak drótok is, szintén kb 6-800Ft -kategória. De drótot nem vettem, anyáméktól nyúltam le egy doboz gemkapcsot. Ja, és a subler meg a tolómérő. Ezt is anyámtól tudtam meg! |
|
(#54664) dikdom hozzászólása
|
Válasz •
|
Dec 21, 2016 |
|
SG90 -es szervó. Mások is mondták már korábban, ahogyan feszültséget kap, ugrik egyet. Egy volt kolléga bogarat ültetett a fülembe, hogy biztos kap valami tüskét induláskor a jel-vonalon.
Hát nem. Ha kihagyom az arduinot és a jelvezetéket nemes egyszerűséggel a nullára kötöm, a motor akkor is moccan egyet (nem is kicsit, egyébként) a 180 fok - a 2.5ms -os kitöltöttség - irányába.
Próbáltam azt is, hogy teljesen eltekertetem programból és úgy adok rá újra feszültséget. Vicces módon programból nem lehet annyira elforgatni, mint ahogyan fizikailag képes, így ha 180 fokon kikapcsolom és újra bekapcsolom, úgy még tud egy kicsit elfordulni. Amint a uC beállítja a PWM jelet, hogy forogjon 180 fokra, visszatekeredik.
Az arduino servo library-ben be lehet állítani a kitöltöttséget, ott nekem 2600 körül volt a max. De még onnan is továbbfordult, amikor újra áramot kapott.
Nem gondolom, hogy induláskor el kell mozdulnia, hogy be tudja lőni magát (a belső potméter álló állapotban is le tudja jelenti, hogy éppen hol áll a motor), sokkal inkább az olcsó hús és a híg lé jut eszembe. Ennyiért ez a szervó ilyen...
A sorompót motorizáltam (frankón nyílik, záródik), de meg kellett fordítanom a szervót, mert olyan irányba ugrott, hogy ha rossz helyen áll, akkor induláskor kiszakíthatta volna a sorompó zsinórját (inkább egy vékony cérna az)... |
|
(#54665) etwg válasza dikdom hozzászólására (#54664)
|
Válasz •
|
Dec 21, 2016 |
|
Ezekben a szervokban a potenciométer állása dinamikusan van leolvasva, azaz ahhoz, hogy tudja hol áll, a potinak meg kell mozdulnia. (Igy érték el a kivánt pontosságot).
Ha nem adsz semilyen jelet a bemenetre az nem éppen jo, mert akkor a dekodernek magának kell ezt mérlegelnie ami megint csak mozgással és referenciapont kereséssel jár. Ezért minimum az orajelet kellene a bemenetre küldeni. |
|
(#54670) HarciSün válasza etwg hozzászólására (#54665)
|
Válasz •
|
Dec 21, 2016 |
|
Akkor ezek szerint a kezdeti ugrás sehogyan sem orvosolható?
Nagyon érdekelne mert pont ezzel küzdök... |
|
(#54671) dikdom válasza etwg hozzászólására (#54665)
|
Válasz •
|
Dec 21, 2016 |
|
Ezt nem teljesen értem. Azt hittem h OGY egy egyszerű komparátor van a szervón belül, azaz a poti feszültségét összehasonlítja a vezérlő jel alapján belül előállított feszültséggel. Az aktuális helyzet ismerete implicit benne van az algoritmusban (poti feszültsége), ahhoz nem kell tekergetni a motort.
Legalábbis én így csináltam volna, de én nem értek hozzá...
0-ra azért kötöttem, mert meg akartam bizonyosodni arról, hogy nem egy kezdeti tüske miatt moccan meg a szervó, amikor áramot kap. De mivel megmoccan, ezért nem egy feszültség 'tüske' miatt moccan be. |
|
(#54672) dikdom válasza HarciSün hozzászólására (#54650)
|
Válasz •
|
Dec 21, 2016 |
|
Köszi, végignéztem a kódodat. Ami nálad nagyon más, az az, hogy egyszerre csak egy szervó mehet.
Nálam a tableten a kontrollok beállítása javascriptből lesz: betöltéskor tolni fog egy HTTP POST -ot a webszervernek, az pedig válaszolni fog, hogy mi hogyan áll s a javascript ez alapján fogja beállítani a vezérlőket (csúszkák, váltók, lámpák).
Egyelőre egy elég egyszerű lapom van: csak a csúszka állítható, a sorompó és a váltó csak megbökhető, a képen nincs visszajelzése. Viszont a gyerekek már élvezik (csak a sorompó és a mozdony sebessége állítható).
Neked az áram elvétele és visszaadása nem okoz gondot? Az ugrást sikerült végül kiküszöbölni? (Most olvastam az előző hozzászólásodat, töröld a kérdésemet...  ) |
|
(#54673) etwg válasza dikdom hozzászólására (#54671)
|
Válasz •
|
Dec 21, 2016 |
|
Elvben igy müködne, de ahhoz sok precizios elem kellene - többek között jobb poti, pontosabb tengelyek stb. Szerintem ezt akarják kiküszöbölni azzal, hogy dinamikusan olvassák le a potit. Mélyebben én sem mentem bele a dologba, de ugyanezt csinálja akkor is ha rádios modellben van az SG90-s ( hajomodell). A drágább szervok viszont nem. |
|
(#54680) dikdom válasza etwg hozzászólására (#54673)
|
Válasz •
|
Dec 23, 2016 |
|
Utána olvastam a neten, és leginkább az az elfogadott nézet, hogy ezek a(z olcsóbb) szervók a bekapcsoláskor ugranak egyet. Valaki írta, hogy ha a jel és a föld közé egy 4.7k ellenálást betesz, akkor megszűnik az induláskori ugrás. Kétkedve olvasom, még nem próbáltam ki. Volt egy másik megoldás is, de lényegesen bonyolultabb volt ennél, nem vettem a fáradságot az értelmezéséhez. Az előbbi linken, pár hozzászólással előtte olvasható az is.
De szerintem engem az arduino bootloader-e is szivat. Jelenleg 2 szervóm van fönt a pályán: egy a sorompónál és egy a váltónál. Amikor új kódot töltök föl az arduinóra, akkor a sorompós szervó a 180 -fokra, a váltós szervó pedig a 0 fokra tekeredik el, minden parancs nélkül. Kevés híjján a váltóm bánta. Megtanultam, hogy az arduino újraprogramozáskor le kell húznom az érintkezőket...
És ha már szivatás. Magamat is szivatom. Találtam egy library-t ( pigpio) raspberry Pi -re, ami az összes GPIO lábat tudja használni, akár szervóra is, tetszőleges PWM -re, 5us pontossággal. Ez feleslegessé teheti az arduinot a PIm mellett (és kezdhetnék mindent újraprogramozni)...
Mindezek ellenére szépen megy a sorompóm is és a váltóm is, körbe a mozdonyok (egyszerre egy), mindez pedig egy tabletről irányítva. A gyerekeim imádják. És én is! |
|
(#54686) etwg válasza dikdom hozzászólására (#54680)
|
Válasz •
|
Dec 23, 2016 |
|
Nekem kb most 20 SG90 szervom van üzemben , egy kicsit berregnek aztán abbahagyják 1-2 mm-nél nagyobbat nem mozdulnak bekapcsoláskor sem. 8-sával kezeli öket egy Atmel proci. Ami fontos volt és már irtam, hogy kemény táp kellett hozzá. - kábelek nem árnyékoltak, de talán egyszer majd ujrakábelezem. A zümmögés a nagy terepasztalon elveszik igy nem is zavar. |
|
(#54688) dikdom válasza etwg hozzászólására (#54686)
|
Válasz •
|
Dec 23, 2016 |
|
Ha leviszed nullára a jel-vonalat (a rendes, 20ms -os ciklus után), mondjuk 500ms-al az állítás megkezdése után, akkor a zümmögés is elmúlik és nem fog áramot se jelentőset felvenni. Persze ilyenkor nem a motor fog ellentartani, csak az áttétek, meg a fogaskerekek. Váltókhoz elég az is, modell hajókon-repülőkön nyilván nem... |
|
(#54689) etwg válasza dikdom hozzászólására (#54688)
|
Válasz •
|
Dec 23, 2016 |
|
Van benne valamilyen algoritmus, mert csak bizonyos ideig a mozgás után zümmög, majd abbahagyja. |
|
(#54717) HarciSün válasza dikdom hozzászólására (#54680)
|
Válasz •
|
Dec 27, 2016 |
|
Idézet:
„Valaki írta, hogy ha a jel és a föld közé egy 4.7k ellenálást betesz, akkor megszűnik az induláskori ugrás.”
Na erre én is kíváncsi vagyok!
A zizegés nem csak azért rossz mert esetleg zavaró a hangja de közben melegszik a szervó és persze fogyaszt is ami további zavarokat okozhat - ezért lenne jó teljesen kiirtani. |
|
(#54720) dikdom válasza HarciSün hozzászólására (#54717)
|
Válasz •
|
Dec 27, 2016 |
|
Nos, ez érdekes. Ha 4.7k ellenállást teszek a jel és a GND közé, akkor ugyanúgy ugrik a szervó az áramellátás bekapcsolásakor.
Azonban, ha uezt az ellenállást a jel és a +5V közé teszem be, akkor gyakorlatilag megszűnik az elmozdulás (hurrá).
Azért érdekes, mert az eredeti poszt szerint a 0 és a jel közé kell tenni. És hogy nem mindegy neki, hogy a 0 vagy az 5V -ra húzod a jelet...
Kipróbáltam 3 különböző szervóval, nálam vszínű ez lesz a megoldás.
Zizegés: te Arduinot (vagy ilyesmit) használsz. Hívd meg az adottt Servo példányon a detach() fgv -t. Megszűnik a zizegés. |
|
(#54721) etwg válasza dikdom hozzászólására (#54720)
|
Válasz •
|
Dec 27, 2016 |
|
Nem olvastam a posztot, de nem lehetett tul nagy szakember aki irta, mert minden ilyen szerkezetet open collectoros fokozatrol lehet csak meghajtani, ahol egy terhelö ellenállás a 0V felé teljesen értelmezhetetlen. A munkaellenállásnak mindig a plusz felé kell mennie igy lehet terhelni az open collector kimenetet meg egyben a bemenetnek is definiált impedanciát adni.. |
|
(#54723) HarciSün válasza dikdom hozzászólására (#54720)
|
Válasz •
|
Dec 27, 2016 |
|
Akkor a +5 és jel közé rakott 4,7K tényleg stabilan megoldja a kezdeti ugrást?
Nálam a zizegéssel nincs gond: elveszem a tápot- anélkül meg nem tud... |
|
(#54725) dikdom válasza HarciSün hozzászólására (#54723)
|
Válasz •
|
Dec 28, 2016 |
|
Háát. Neked lehet hogy működni fog, te nem arduinot használsz, ha jól emlékszem.
Szóval az íróasztalon, 5V táppal, szervóval s ellenállással működik.
A terepasztalomon nem. Bekapcsoláskor a sorompóm szépen visszamegy a lecsukott állapotba, kb 180-ra. Valahol ott van a programozott lecsukott állapot is, szerencsére.
Ha kiveszem az arduinot a rendszerből, akkor a soromó bekapcsoláskor mozdulatlanul mered az égbe...
Ez még az arduino bootloadere lesz a setup() előtt, mert miután a sorompó lecsukódik, rá kb fél másodpercre inicializálódnak a relék és a szervók, a sorompó ilyenkor áll be az alap 170.
Mondom hogy engem szivat a bootloader.
Annyit sikerült elérnem, hogy a sorompó nem lecsapódik, hanem lecsukódik. Nem lassan, de nem egy pillanat alatt, legalább... |
|
(#54726) dikdom válasza etwg hozzászólására (#54721)
|
Válasz •
|
Dec 28, 2016 |
|
etwg: Ez azt jelenti, hogy a jel vezetéken a 0ra kötés és a 'lebegve hagyás' ugyanazt jelenti a szervónak? |
|
(#54727) dikdom hozzászólása
|
Válasz •
|
Dec 28, 2016 |
|
Sikerült beüzemelnem az asztalomon az első ütemet: van egy kör, ahol PWM-el vezérelten jár körbe a mozdony, van sorompóm, van egy váltóm, ami mellett van 2 pár piros-zöld LED. Nekem ez már óriási lépés. Nem modell, hanem játékvasút, nem is fényképezek inkább, kapnék én itt hideget-meleget!
Viszont két kérdésem lenne:
1) jól gondolom, hogy a sebesség nem feltétlenül lineárisan arányos a PWM jel kitöltöttségével? Azaz ha azt szeretném, hogy szépen gyorsuljon a mozdony, akkor valami nemlineáris fgv-t kellene implementálni a kitöltöttségre? Ha ez így van, akkor milyet. Jelenleg csak annyi trükköt alkalmazok, hogy 20%-78% -ig engedem a kitöltöttséget (20 körül indul el a legérzékenyebb mozdonyom, 78% adja a 12V -ot a 16.5V -os betápnál).
2) a 3 mozdonyom eléggé eltérően reagál: közülük csak a nagy gőzös az, amelyik szépen reagál a PWM jelre, a másik kettő hallhatóan 'zümmög' lassú sebességnél. Arra gondoltam, hogy a zavarszűrő (?) kondikat lecserélném a mozdonyokban, ha az használ. Használ? Esetleg a szénkefék cseréje? Vagy ebbe nyugodjak bele, hogy a régebbi mozdonyok ilyenek?
Köszönöm a véleményeket! |
|
(#54728) etwg válasza dikdom hozzászólására (#54726)
|
Válasz •
|
Dec 28, 2016 |
|
Igen!!
A ki meg a bemenetek a mai modern kütyükben mindig alapbol magas szinten vannak. Pl a mikroprocikban 10 kOhmmal a pluszra huzva. A nulla szint az aktiv, azaz ha GND-re kapcsolod, akkor következik valamilyen változás.
A meghajto fokozat ha GND-re kapcsol az igen kis impedancián teszi <100 Ohm. Igy ilyenkor zavar nem igen keletkezhet. A levegöben levö zajok is az amplitudojukrol hiresek (hány volt az amplitudoja) azaz, ha ezeket ki akarjuk zárni, akkor a bemenet impedanciáját kell csökkenteni. Miután az nyugalmi állapot (amikor nincs vezérlés) - magas szint (ide van huzva a bemenet) igy ennek az impedanciáját kell csökkenteni - a belsö kb 10 kOhmos ellenállással egy párhuzamos külsö ellenállást kötni (a bemenet meg a plusz közé). A meghajto fokozat vigan elbir akár 1 kOhmos munkaellenállást is, azaz a 4,7 k + a belsö 10 kOhm még mindig kb 3 kOhm eredöt ad.
Ezzel növeled a bemenet zaj immunitását nyugalmi állapotban ( amikor nincs aktiv jel = GND) mert a zajnak a két ellenállás eredöjén kell elvégeznie a káros hatását. Azaz minél kisebb a bemeneti impedancia annál immunisabb a zaj ellen. |
|
|
| |
2025. Ápr, 17. Csü
14:52:53 |
| |
Jelenleg 105 fő olvassa az oldalt |
|
|